- Published on
Arduino et FreeRTOS - Chapite 1: Les tâches (suites)
- Authors
- Name
- Tawaliou ALAO
- @Tawal_Mc
Je voudrais préciser que tout le blog et mes futurs articles (d'ici la fin de ce mois) seront en anglais et plus en français. Désolé de l'annoncer ainsi mais je présenterai bientôt les raisons.
Cet article n'est que la suite de l'article sur l'utilisation des tâches de FreeRTOS en Arduino que j'ai publié récemment: Arduino et FreeRTOS - Chapite 1: Les tâches et donc n'est pas pour un débutant en système embarqué mais il faut juste être à l'aise avec les microcontrôleurs.

Notre objectif
Nous allons nous baser sur un circuit très simple mais en mettant l'accent sur le fonctionnement et l'utilisation des tâches en FreeRTOS 😎.
Test 1: RFID-RC522 et Serial Monitor + LED (2 tâches)
Dans celui ci:
- Le module RC-522 identifie l'ID des cartes RFID/badges et l'affiche dans le Serial monitor
tâche 1- (on va les départager par la suite pour en faire deux tâches distinctes 😈) - La LED sera en train de clignoter
tâche 2
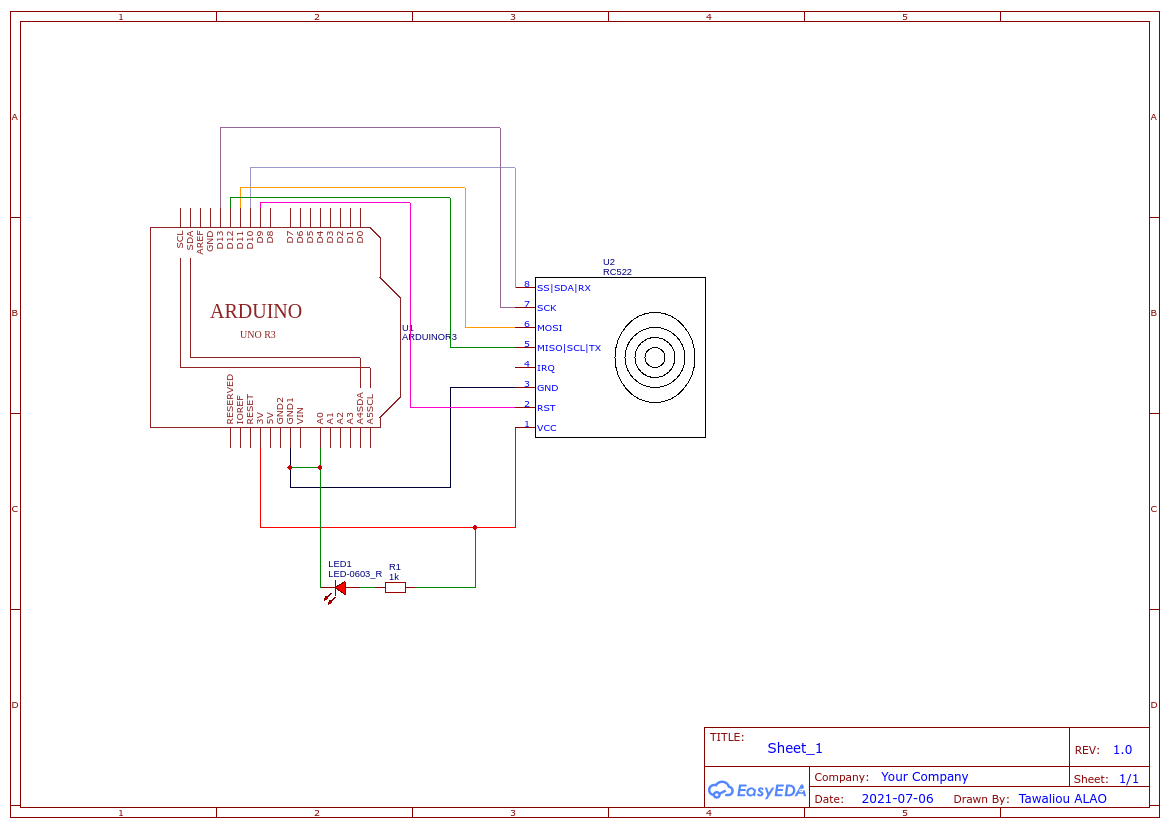
La LED est reliée au pin A0 (ne pas oublier la résistance ohmique) et le câblage du module RC-522 est le suivant
| RFID | Arduino |
|---|---|
| 3.3V | 3.3V |
| RST | D9 |
| GND | GND |
| RQ | - |
| MISO | D12 |
| MOSI | D11 |
| SCK | D13 |
| SDA | D10 |
Vou pouvez jeter un coup d'oeil rapide sur l'image suivante


Si c'est bon nous pouvons débuter la partie code.
- On inclut les en-têtes
#include <Arduino.h>
#include <Arduino_FreeRTOS.h> // Need for FreeRTOS with Arduino
#include <SPI.h> // RFID communicate with Arduino via SPI
#include <MFRC522.h> // Need to use RFID utilities
- On définit les ports
const uint8_t ss = 10;
const uint8_t rst = 9;
const uint8_t led = A0; // led pin
MFRC522 rfid(ss, rst);
- On définit les prototypes des fonctions:
tâcheset fonctions simples - (j'en ai l'habitude surtout quand je compte faire des surcharges de fonctions)
////////////////////////////////////
///////// Task prototype ///////////
////////////////////////////////////
void TaskRfidRead(void *pvParameters); // task to read rfid
void TaskBlinking(void *pvParameters); // task to blink led
void TaskSerialPrint(void *pvParameters); // task to print in serial
////////////////////////////////////
/////// Utilities functions ////////
////////////////////////////////////
String getRfidID(byte *buffer, byte bufferSize); // to format and return the rfid id
Reamarquez ici que nos tâches ont un prototype bien connu: elles prennent en paramètre un pointeur générique (peut pointer ensuite sur n'importe quel type de données). Certes
nous n'allons pas l'utiliser mais il reste important ce paramètre.
- Le fameux
void setup()
void setup()
{
// put your setup code here, to run once:
Serial.begin(9600);
SPI.begin(); // Init SPI bus
rfid.PCD_Init(); // Init MFRC522
// tasks creation. We can verify if task has been successfully created
// so we can log some messages
if (xTaskCreate(TaskRfidRead, "rfid-reader", 128, NULL, 1, NULL) == pdFAIL)
{
Serial.println("cannot create task: rfid-reader");
}
if (xTaskCreate(TaskBlinking, "blinking", 128, NULL, 1, NULL) == pdFAIL)
{
Serial.println("cannot create task: blinking");
}
vTaskStartScheduler(); // Start the scheduler so the tasks start executing
}
Pour ceux qui avaient lu l'article précédent (celui introduisant les tâches avec Arduino), ils remarqueront un petit
changement lors de la création des tâches. Prenons le cas de la création de la tâche rfid-reader:
if (xTaskCreate(TaskRfidRead, "rfid-reader", 128, NULL, 1, NULL) == pdFAIL)
{
Serial.println("cannot create task: rfid-reader");
}
Cette fois ci, si nous vérifions si la création de la tâche s'est déroulée normalement. xTaskCreate renvoie pdFAIL
si la tâche n'a pas été créée. En plein processus de débuggage je pense que cela servirait.
Aussi les deux tâches ont été créées avec le même niveau de priorité (task priority): 1. Ceci implique que nous sommes
sûr que les deux tâches s'exécuterons en se basant sur le tick period.
- Le
void loop(), le malheureux reste vide.
void loop()
{
// put your main code here, to run repeatedly: NOTHING HERE
}
- Impémentation de la tâche
rfid-reader
////////////////////////////////////
///////// Task implementation //////
////////////////////////////////////
// task to read rfid
void TaskRfidRead(void *pvParameters) {
(void) pvParameters;
for(;;) {
if (rfid.PICC_IsNewCardPresent() && rfid.PICC_ReadCardSerial()) {
String rfidID = getRfidID(rfid.uid.uidByte, rfid.uid.size);
Serial.print("rfidID: "); Serial.println(rfidID);
}
}
}
- Impémentation de la tâche
blinking
// task to blink led
void TaskBlinking(void *pvParameters) {
(void) pvParameters;
pinMode(led, OUTPUT);
for(;;) {
digitalWrite(led, HIGH);
vTaskDelay( pdMS_TO_TICKS(200) );
digitalWrite(led, LOW);
vTaskDelay( pdMS_TO_TICKS(200) );
}
}
vTaskDelay joue le même rôle que l'éternel delay juste que vTaskDelay fait passer la tâche concernée dans le blocked state
donc la tâche ne s'éxécute plus et il prend en paramètre le nombre de tick period (expliqué dans l'article précédent). Et pour cela
on utilise pdMS_TO_TICKS qui prend en paramètre la durée d'attente et retourne le tick period.
- Fonction de formatage des ID des cartes
////////////////////////////////////
/////// Utilities functions ////////
////////////////////////////////////
String getRfidID(byte *buffer, byte bufferSize) {
String uidRead = "";
for (byte i = 0; i < bufferSize; i++) {
uidRead += buffer[i] < 0x10 ? " 0" : " ";
uidRead += String(buffer[i], HEX);
}
uidRead.toUpperCase();
return uidRead;
}
Exécutez le code et admirez le réal-time offert par FreeRTOS. Observez correctement les sorties du moniteur et l'allumage de la led, nous en aurons besoin pour la suite.
Conclusion 1:
Quand nous passons une carte, son ID s'affiche plusieurs fois dans le serial monitor (notre code ne prend pas en charge ce cas). Nous pouvons le contourner (sera fait après) avec un vTaskDelay. Blinking marche correctement.
Test 2: RFID-RC522 et Serial Monitor + LED (2 tâches + différentes priorités)
Alors dans un premier cas nous allons:
- Augmenter la priorité de
rfid-reader
if (xTaskCreate(TaskRfidRead, "rfid-reader", 128, NULL, 2, NULL) == pdFAIL)
{
Serial.println("cannot create task: rfid-reader");
}
On remarque que la led ne s'allume même plus: la tâche blinking a une priorité inférieure à celle de rfid-reader so elle
reste dans le blocked state alors que la première est dans le running state. En réalité à chaque tick interrupt, le gestionnaire
de tâche détermine la prochaine tâche à exécuter et comme rfid-reader a une priorité élevée (😈 peut être que Thanos s'apprête à envahir la terre se dit il 😈)
elle l'exécute à chaque fois. Ramenez juste la priorité de la tâche blinking à 2 et vous verrez qu'on aura le même fonctionnement que celui du premier test
(la led s'allume et s'éteint).
Test 3: RFID-RC522 et Serial Monitor + LED (2 tâches + différentes priorités - ajout vTaskDelay à rfid-reader)
Cette fois ci nous allons ajouter le vTaskDelay à rfid-reader juste après l'affichage dans le serial (dans le if). Cela empêchera les affichages en boucle de la même ID en quelques
secondes mais aussi...à la tâche blinking de s'exécuter chaque fois que rfid-reader passe dans le blocked state car le
gestionnaire de tâche en ce moment verra (qu'est ce qu'il y peut, même les Avengers avaient échoué la première fois) la tâche blinking en attente.
Une remarque: Quand deux tâches sont en attentes d'exécution, celle avec la plus grande priorité sera choisie. Si les deux ont le même niveau de priorité alors celle ayant attendue le plus sera choisie.
Conclusion 2:
L'idéal (utopique) alors est d'avoir le même niveau de priorité pour les tâches ou alors de faire basculer des tâches de priorité élevée dans le blocked state pour permettre aux tâches de priorités inférieures de s'exécuter ou même de changer de temps en temps la priorité des tâches - (eh oui cela se fait aussi) .
Test 4: RFID-RC522 + Serial Monitor + LED (3 tâches)
Bref ici c'est un exercice pour la prochaine fois:
- Nous devons créer trois tâches: l'une pour receuillir l'ID de la carte, l'autre pour afficher l'ID, et la denière pour le blinking.
Essayez de le réaliser, moi je vais pour cela utiliser un autre concept de FreeRTOS. Je ne vous le dit pas, mais la logique est
de passer l'ID à la tâche qui l'affiche uniquement quand il y a ID. En lisant l'article introductif sur FreeRTOS vous verrez le mot magique.
Alors
J'avoue qu'avec ces exemples nous ne remarquons pas vraiment l'importance de FreeRTOS, mais regadez le code:
- Nous exécutons des actions sans pour autant appeler des fonctions les unes après les autres - (nous avons acquis notre indépendance)
- Chaque tâche à l'air de ne pas se
sentirconcernée par ce que fait l'autre tâche - Nous pouvons explicitement indiquer l'importance de l'exécution d'une fonction, quand elle peut s'exécuter explicitement sans se soucier de
millis()ou du retour d'une fonction bref les possibilités sont incroyables surtout avec les...
Au passage j'utilise VSCode + platformIO(pour ceux que cela interesse). Je vous prépare du lourd pour la prochaine fois. N'hésitez pas à me faire des retours dans mon mail ou sur mon Twitter ou Linkedin dont les références sont en dessous
ou simplement cliquer sur Partager •.
Et sur ce: can you smell what TawalMc is cooking?